I have all the centres, and all the angles of the vectors (0,0)–>(shape)
I guess I must combine two transformation in order to have my rotation, but I cannot sort it out…
n
ps the patch here is just an example, the real stuff is way more complicated, a.e. I cannot rotate one shape and then duplicate it around the center
I made an example of how you can rotate the shapes, in general I would recommend you to use individual transformations instead of using the transform node, it is my experience that it helps most people understanding what is going on in what order.
Brilliant! But, unluckily, I cannot do what you say… It is a good idea, but I need to really transform the coordinates of each points. The real situation is way more complicates, the patch here is only a simplification.
Quite impressive… But actually I’m unable to let this works inside the Rotation2.v4p (see the 6th post, the one starting with “Brilliant! But…”)
Every time I try I got really strange behaviour
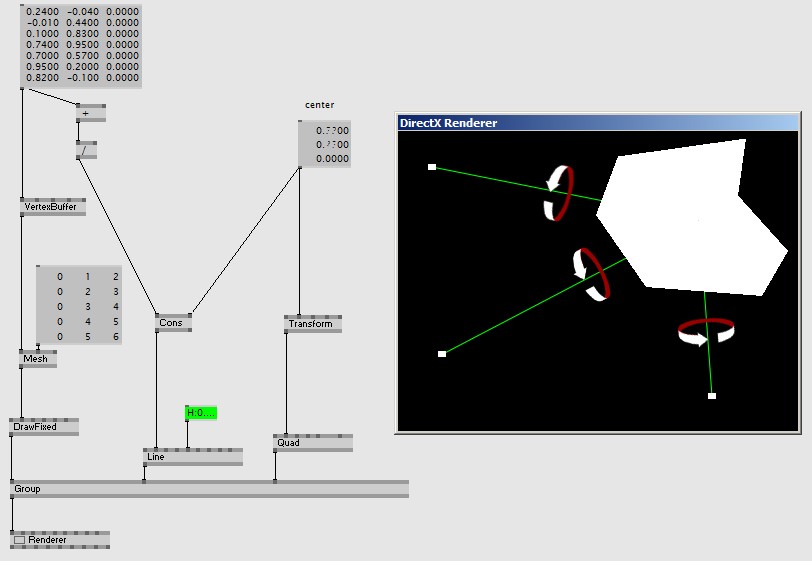
Actually the shape follow the moving point, in orientation. What I’m trying to do is in the image… Rotating, time by time, only around the green axis, not around the others
n
mmmm the things is like this:
randomly fixed a centre, the objects make a full rotation (360 degrees) around the green axis (centre-ojbect). Then after a while, a new centre is choose, and again there is a new green axes and a new rotation. But during the rotation the centre not move, an so don’t does the axes
have you tried AxisAngle (Quaternion Set) node or quaternions all-together? they can solve a lot of stuffs what would be a headache with euler rotations.
Perhaps quaternions are the answer… I don’t know anything of them. I got it to a point currently, where we need to have some sort of memory of the rotation… so thinking about something with a framedelay, but that will change the structure quite a bit I think.
the attached patch has it as far as I could get without framedelay… perhaps some thinking tomorrow will bring it a bit further.

{kind=link}